
外观
AirGym Sim2Real Deployment
We maintain a ROS node named inference to obtain state from PX4 autopilot and camera, as well as to conduct the inference. This node will load the pretrained model at the initialization, and subscribe two main topics: /mavros/local_position/ and /camera/depth/image_rect_raw/. Then publish the command to /airgym/cmd/, as shown below.
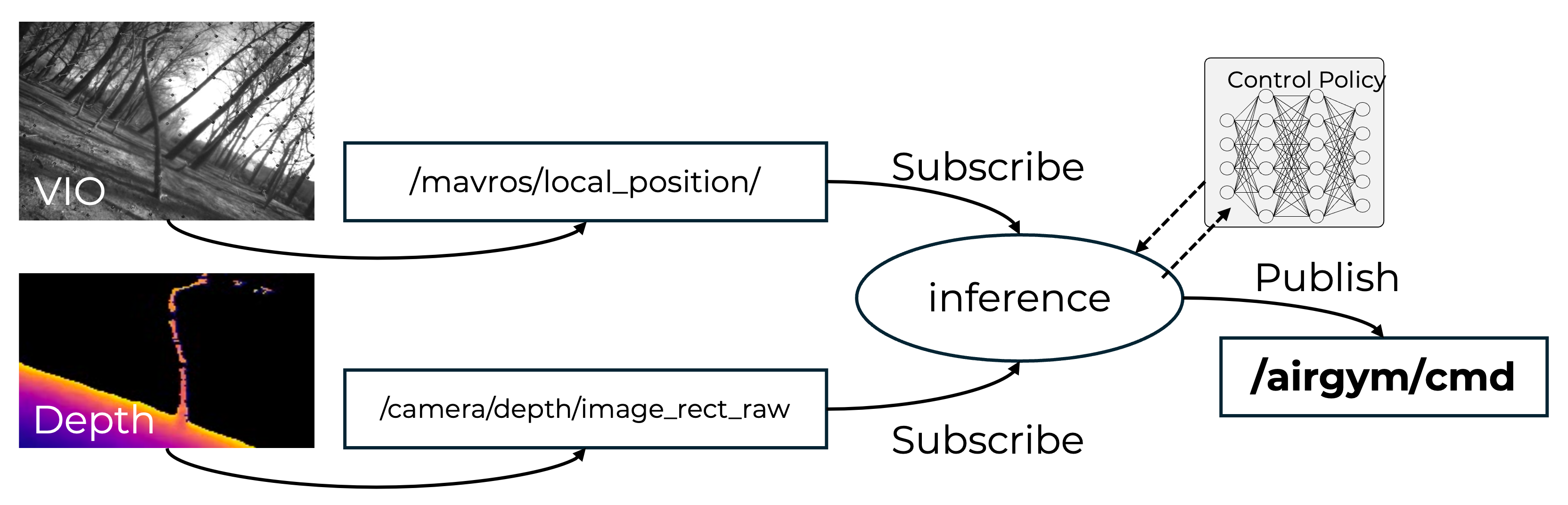
The estimated states are from an implemented vins_fusion, to obtain odometry data under a local framework. The depth image comes from Realsense D430, and it is sent into neural network after a simple processing. The depth values on each pixal beyond our expectation are clipped and colored as black.