
外观
System Overview
Hardware
X152b is a self-designed quadrotor for DRL. It integrates racing drone power, sensing, and onboard computating capability. The X152b flight platform features a 152mm frame size and utilizes the Khadas Edge2 onboard computing platform, integrated with the Rockchip RK3588S chip. It is powered by a 4×Cortex-A76 + 4×Cortex-A55 processor setup, delivering 6 TOPS of AI computing power. The platform is equipped with a RealSense D430 camera, capable of capturing stereo infrared and depth images. The X152b employs a 5-inch racing drone propulsion system, offering agile and powerful performance during high-maneuverability operations, with a maximum speed of up to 30 m/s. Additionally, it incorporates burly high-impact shell from OddityRC, making it safe and durable.
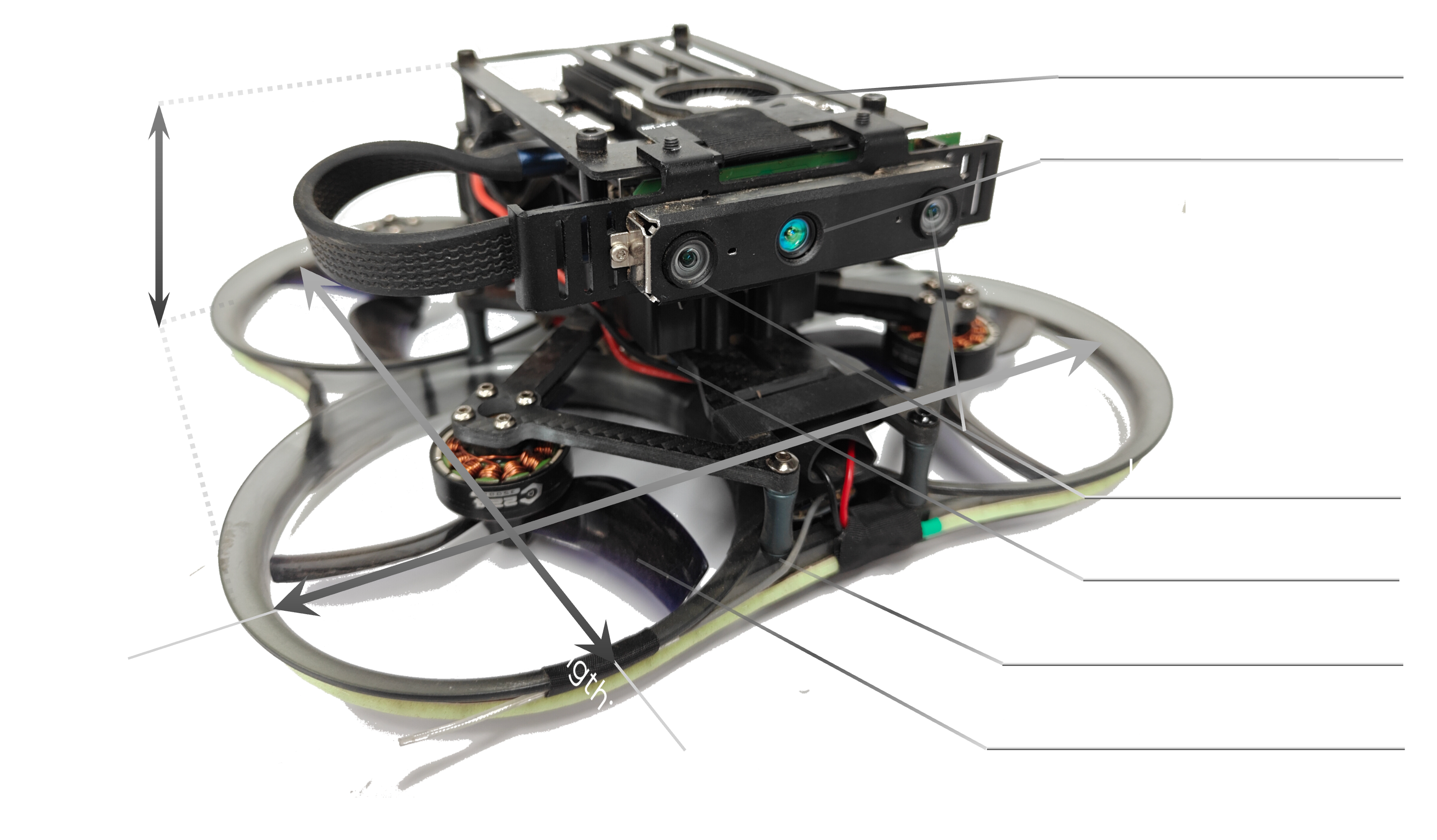
X152b display
Hardware platform
Software
The software pipeline of our demonstration system is illustrated below, where we have implemented two separate closed-loop DRL frameworks for training and deployment, tailored for simulation and real-world environments.
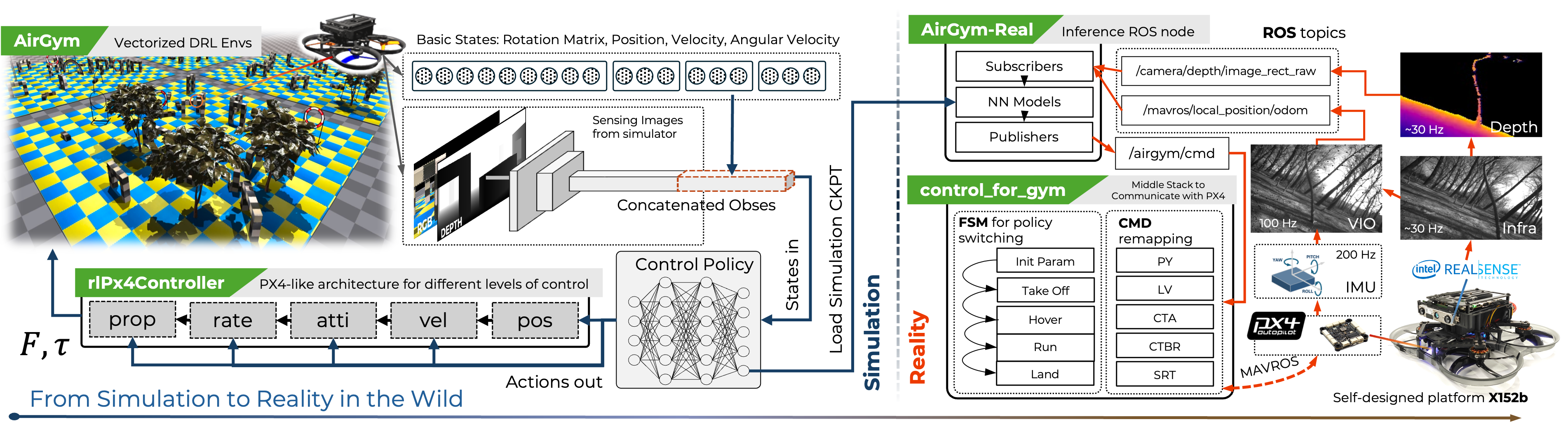
Pipeline
System overview: describe the relationship between four toolkits: AirGym, AirGym-Real, rlPx4Controller, and control_for_gym
AirGym: a parallel simulation platform for quadrotor deep reinforcement learning.
rlPx4Controller: a strict PX4-like geometric flight controller for different levels of controls.
AirGym-Real: a sim-to-real ROS node for sensing processing and neural network reasoning, with onboard state estimation implementation.
control_for_gym: a ROS based control bridge for neural network inference.