
外观
NoMachine可视化操作
连接NoMachine
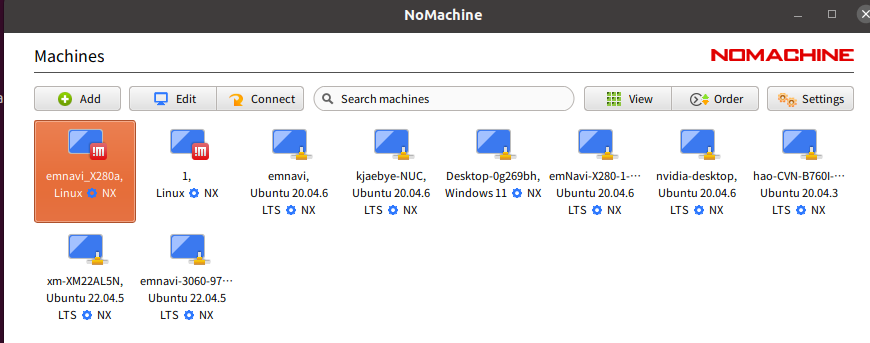
NoMachine是一款主要用于局域网下的可视化远程桌面软件
- 通过NoMachine可视化远程桌面连接
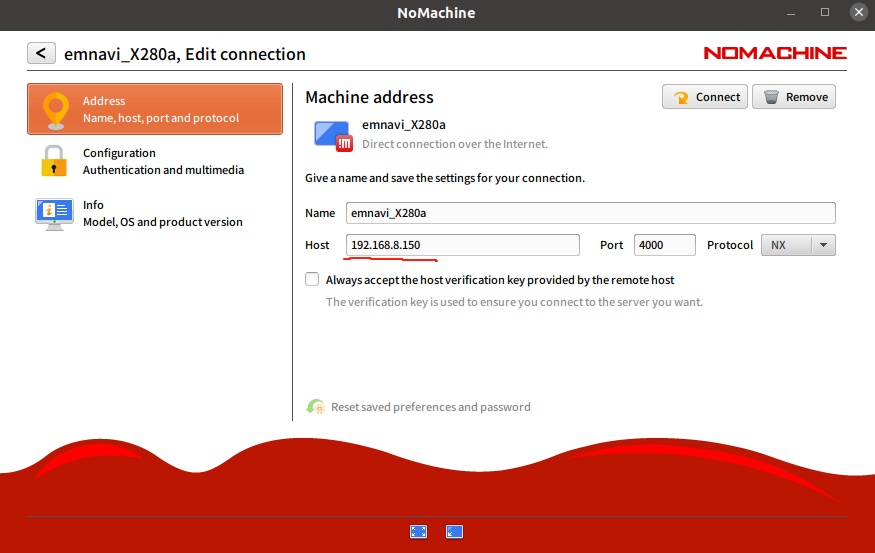
- 选择你要远程的设备,鼠标右键点击
Edit connection,ip设置为飞机NX主机的ip地址
- 选择你要远程的设备,鼠标右键点击
- 选择合适的分辨率,窗口大小
具体NoMachine使用,如下视频所示:
NoMachine通过rviz 3D可视化
- NoMachine内点云可视化:
- rviz(全称:ROS Visualization):是一个功能强大的 3D 可视化工具,主要用于调试和展示机器人感知、状态和动作的数据
- 通过NoMachine,远程连接飞机的NX主机桌面后:命令栏运行以下命令,打开rviz进行点云可视化
source ~/emnavi/X280/devel/setup.bash
rviz -d ~/emnavi/X280/src/livox_ros_driver2/config/display_point_cloud_ROS1.rviz结果如图所示:
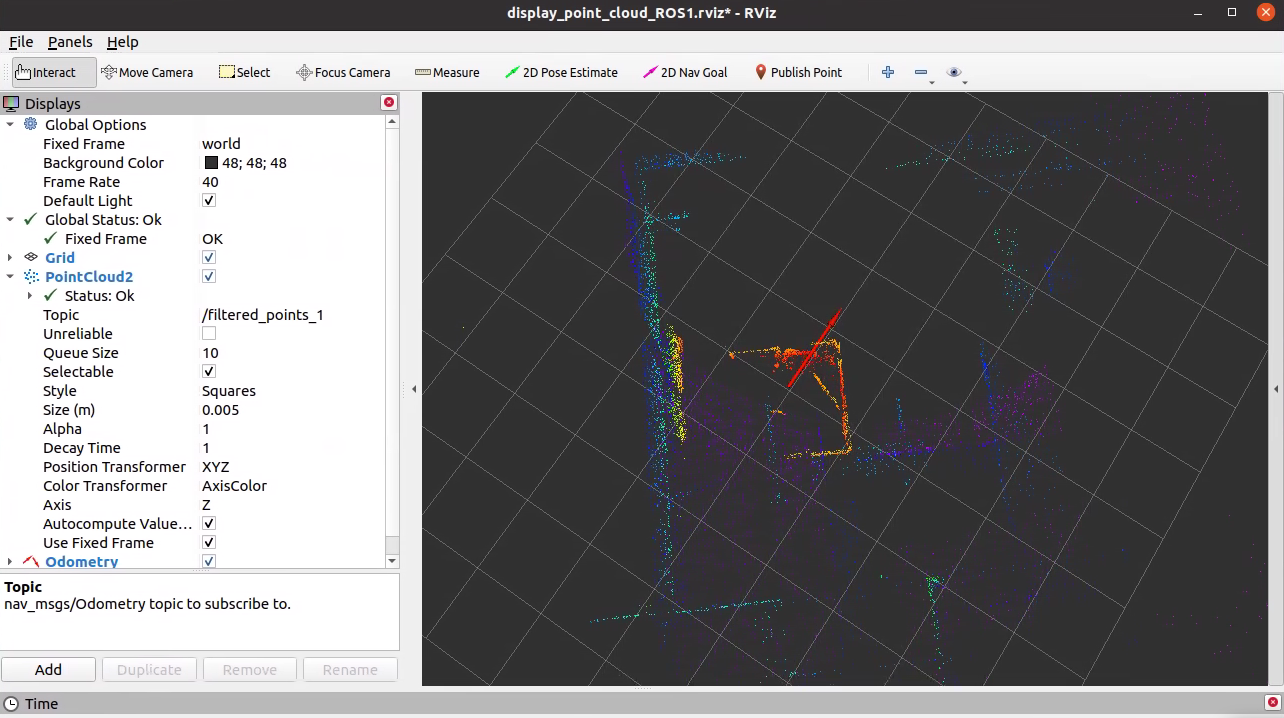
具体查看的点云话题为:
/local_map # 局部点云地图(ego-planner的点云输入)
/cloud_registered_1 # fast-lio转换的全局坐标系点云
/filtered_points_1 # 二次认为处理过的点云
/livox/lidar # MID360原始点云数据上述话题名称中,最后一位为数字的,数字是飞机的ID
NoMachine内ego-planner可视化:
- ego-planner是一种基于局部感知的实时三维路径规划算法,主要用于无人机等机器人在未知或动态环境中的自主避障飞行
- 它可视化的数据主要有:障碍物膨胀层、规划的轨迹、目标点
- 在远程桌面中,同样是使用rviz来可视化ego-planner算法
- 通过NoMachine,远程连接飞机的NX主机桌面后:命令栏运行以下命令打开rviz进行ego-planner可视化
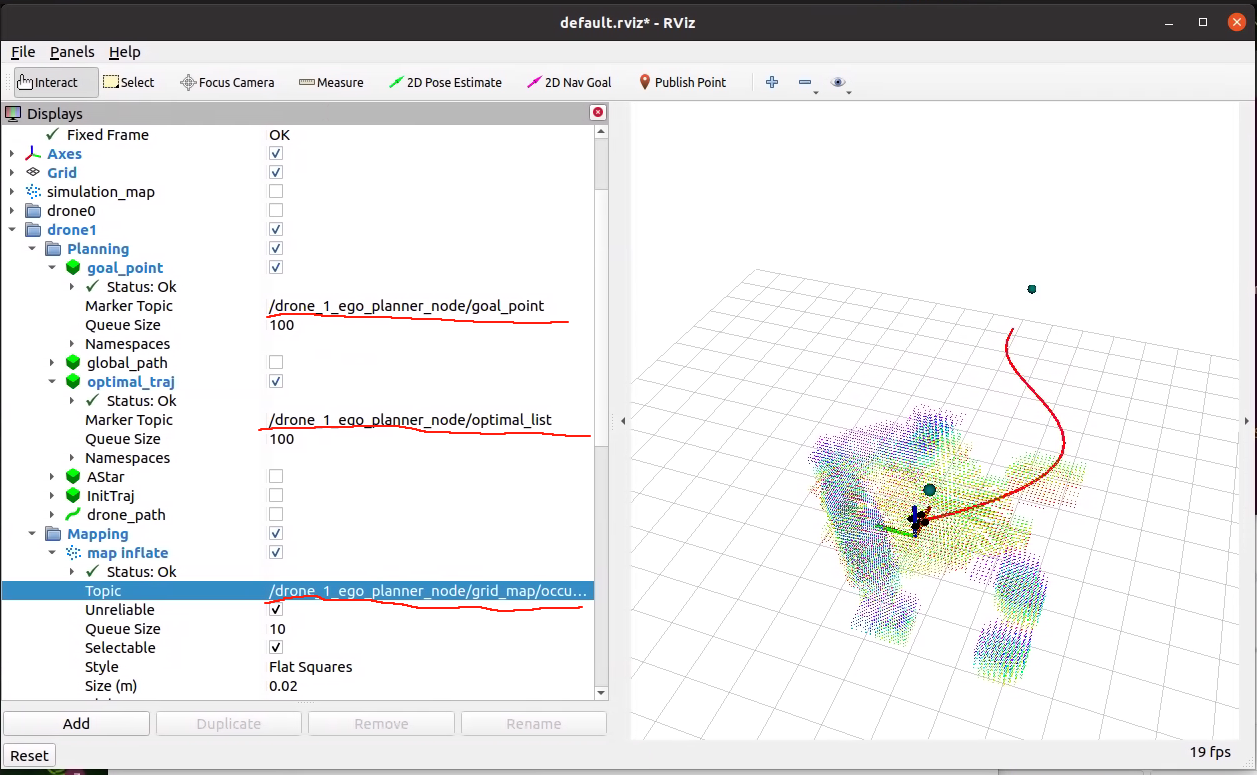
source ~/emnavi/X280/devel/setup.bash rviz -d ~/emnavi/X280/src/ego-planner_flast-lio2_ws/src/planner/plan_manage/rviz/default.rviz如下图所示,为1号飞机的ego-planner可视化,请根据的飞机ID,勾选可视化文件夹
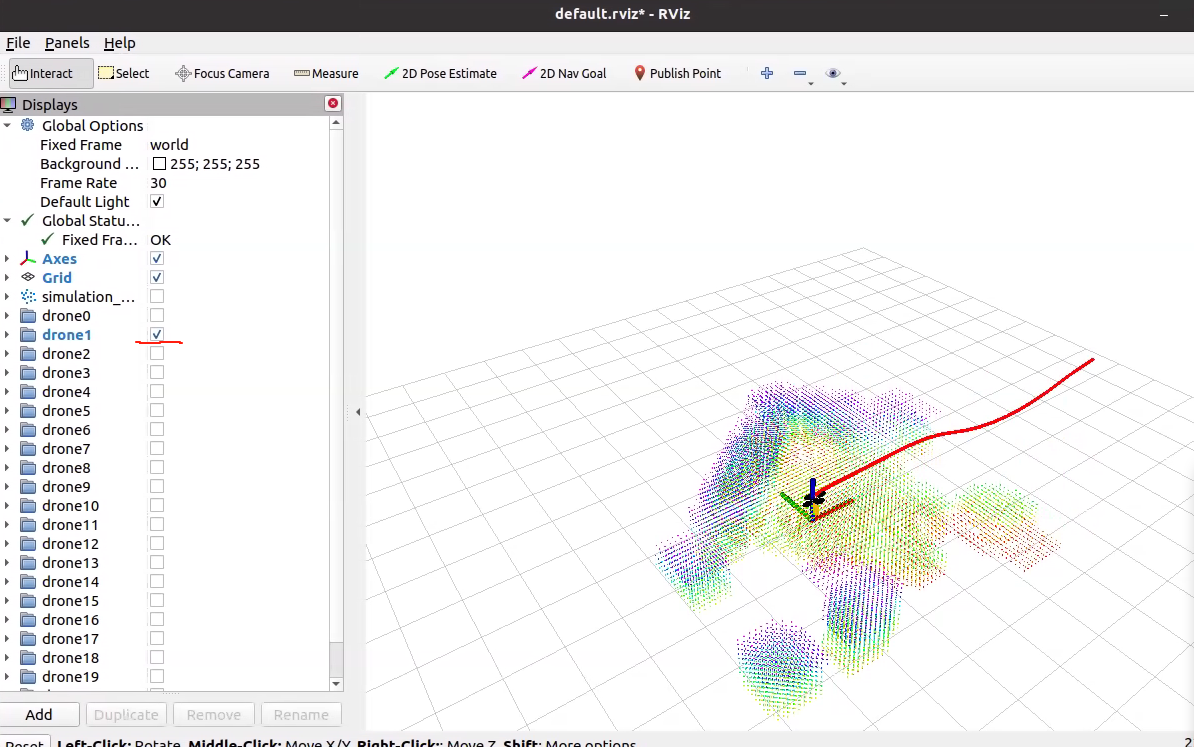
- ego-planner主要可视化具体查看的话题分别为:
/drone_1_ego_planner_node/grid_map/occupancy_inflate # 障碍物膨胀层 /drone_1_ego_planner_node/optimal_list # 规划轨迹 /drone_1_ego_planner_node/goal_point # 目标点话题drone_后面的数字,是飞机的ID。1号飞机的ego-planner可视化,如下图
- 离线bag包可视化
- 在ROS中bag 包(rosbag) 是一种专门用于记录和回放 ROS 消息的数据文件
- 它的文件扩展名通常是 .bag,可以将机器人系统中的各类话题(topic)上的消息记录下来,方便之后用于调试、数据分析、仿真等
- 录制bag包的命令如下:
rosbag record -a- 播放bag包
roscore rosbag play xxx.bag # xxx.bag,是你本地录制的.bag文件- 运行点云或ego-planner可视化
source ~/emnavi/X280/devel/setup.bash rviz -d ~/emnavi/X280/src/livox_ros_driver2/config/display_point_cloud_ROS1.rviz # 点云可视化 rviz -d ~/emnavi/X280/src/ego-planner_flast-lio2_ws/src/planner/plan_manage/rviz/default.rviz # ego-planner可视化