
外观
常见飞行错误
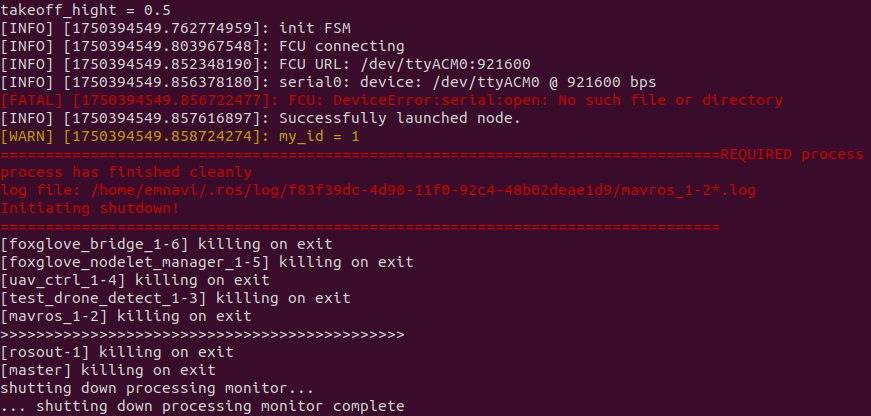
飞机初始化错误
[FATAL] [1750394549.856722477]: FCU: DeviceError:serial:open: No such file or directory
如下图:
- 1)可能存在 USB 接口接触不良
- 重新插下线,再次尝试运行飞机初始化脚本one_shot_single.sh,看能否连接
- 2)串口连接失败
- 进入飞机电脑终端若能识别,输入以下命令,会显示出一个名为 ttyACM0 的设备文件
ls /dev | grep ttyACM* - 若能找到设备号但无权限连接,授予权限后,再次尝试运行one_shot_single.sh
sudo chmod +X /dev/ttyACM0
- 进入飞机电脑终端若能识别,输入以下命令,会显示出一个名为 ttyACM0 的设备文件
QGC 连接不上飞机?
- 1) PX4设置连接远程电脑的ip地址,不是电脑端的ip
- 修改 目录
emnavi/X280/src/emnavi_sdk/global_interface/config下的drone_param.yaml文件:
将第8行的px4_fcu_url = 10.42.0.171,
其中10.42.0.171,修改成你电脑端的ip地址
- 修改 目录
- 2) QGC使用了过旧的版本
- 更新最新的QGC版本,官网安装链接QGC官网
启动激光里程计fast-lio报错
- 1)脚本会自动检测MID360启动情况,和里程计odom初始化!
- 启动里程计时,应保证飞机静止。
- 若初始角度和位置超过限定范围(yaw+-5度,pose两秒内变动+-0.5m),
- 则会强制杀死所有节点
- 多次出现被自动kill掉所有节点的情况,应重启PX4
- 单启动one_shot_single.sh脚本,使飞机与NX连接初始化在电脑控制端
- 打开QGC地面站,(参数->工具->重启飞行器)手动重启PX4。QGC地面站设置
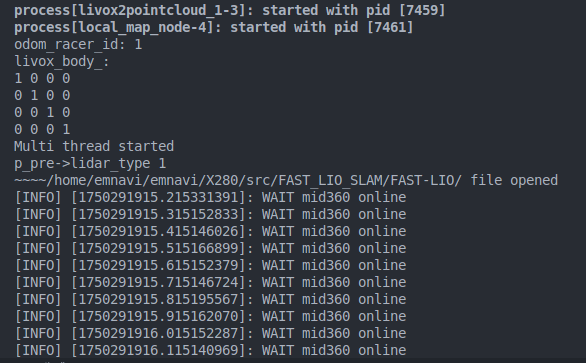
- 2)没收到雷达数据报错
- 检查雷达线材是否松动
- 检查一下雷达的配置文件X280/src/emnavi_sdk/global_interface/config/livox_ros_driver2/MID360_config.json
- 检查雷达ip、雷达连接飞机NX主机的有线网卡ip地址,是否与雷达参数文件匹配
- 雷达数据没收到会报错,如下图所示:
- 3)fast-lio算法未能正常启动
- 飞机的NX主机,未能持续地收到PX4的imu数据
- PX4数据连接异常,检查PX4是否串口连接正常
- 飞控串口连接正常后,重新运行飞机初始化脚本one_shot_single.sh
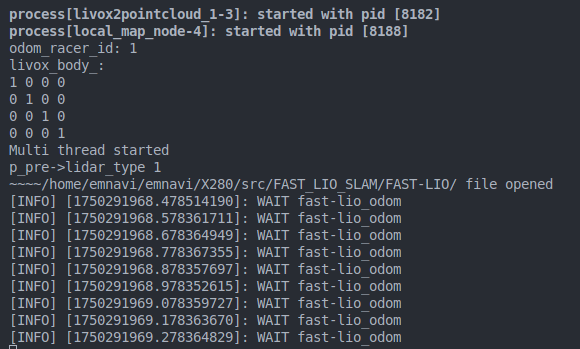
- PX4与飞机的NX连接成功后,再运行fast-lio.sh脚本,正常启动后能收到其里程计话题:
/livox_Odometry,全局点云话题:/cloud_registered - fast-lio的未正常启动,会提示未受到fast-lio发送的里程计odom数据,报错如下图所示:
- 飞机的NX主机,未能持续地收到PX4的imu数据
运行ego-planner算法报错
- 1)执行
run.sh后无法进行ego-planner规划,飞机保持悬停状态- 命令栏终端显示如下所示:
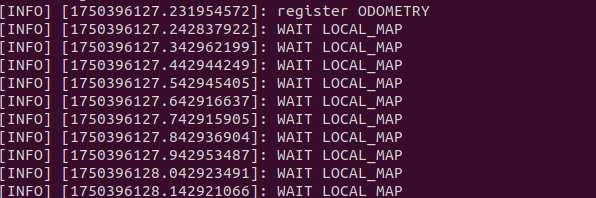
- 2)ego-planner没有收到点云数据
- 3)该点云数据是累积雷达点云数据后产生的,再通过ROS发布了10hz频率的话题:
/local_map - 4)解决方法:
- 重新启动fast-lio.sh脚本,输入以下指令,查看点云的发送频率
rostopic hz /local_map- 观察到发送频率>9HZ,则local_map正常启动
- 再次从“自主飞行”的第一步初始化飞机,一步一步走到运行ego-planner算法,看能否进行自主飞行避障