外观
常用飞行参数设置
主要参数一览
- ~/emnavi/X280/scripts 脚本文件 下述6个脚本中,除ego-planner飞行脚本run.sh外,均不用修改
fast_lio.sh # 雷达驱动和fast-lio的启动脚本
kill_one_shot.sh # 关闭所有飞行节点脚本
one_shot_single.sh # 飞行控制脚本
take_off.sh # 起飞脚本
land.sh # 降落脚本
run.sh # ego-planner飞行脚本- ~/emnavi/X280/src/emnavi_sdk/global_interface/config文件夹,存方着常用算法的参数文件
drone_param.yaml # 飞机的编号、起飞高度等参数
ego_planner文件夹 # ego-planner的底层算法参数,用于设定的路径点
fast_lio文件夹 # fast-lio的参数
livox_ros_driver2文件夹 # 用于配置雷达ip地址,雷达连接飞机NX主机的网卡ip地址
vins_fusion文件夹 # Vins_fusion的常用参数常修改的文件与具体参数
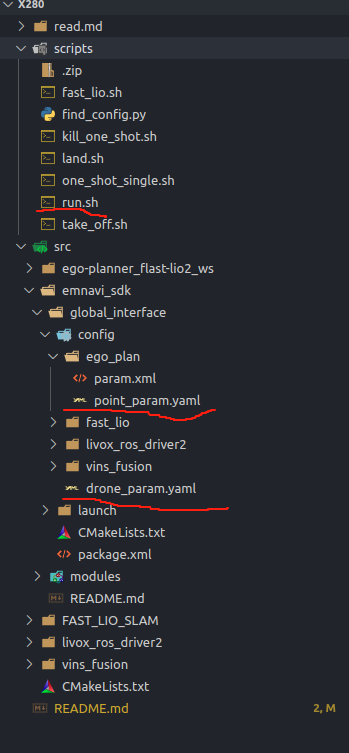
常会修改的文件
- ~/emnavi/X280/src/emnavi_sdk/global_interface/config/
- drone_param.yaml
- ego_planner/point_param.yaml
- ~/emnavi/X280/scripts/
- run.sh
如下图所示,主要会修改如下三个文件
具体修改的参数:
- drone_param.yaml文件
drone_id: 1 # 飞机id编号
TAKEOFF_HEIGHT: 0.5 # 起飞时悬停的高度
px4_fcu_url: 192.168.8.192 # PX4连接远程电脑的ip地址,远程电脑通过QGC配置PX4飞控的飞行参数- ego_planner/point_param.yaml文件
fsm/waypoint_num: 10 # 规划点的数量,10为个数
fsm/waypoint0_x: 1.0 # 设定点0的x为1.0
fsm/waypoint0_y: 0.0 # 设定点0的y为0.0
fsm/waypoint0_z: 0.6 # 设定点0的z为0.6同理,fsm/waypointx_x: 1.0 设定点x的x坐标系为1.0
- run.sh脚本中第7、8行,ego-planner规划的最大飞行速度和加速度
- ego-planner极限速度和加速度:
- 二者值不建议超过2
- 极限速度和加速度的值为2.5
- 默认速度1.5m/s,加速度1.0 m^2/s
- ego-planner极限速度和加速度:
- 具体第7、8行代码的默认是
max_vel=1.5 # 运动速度
max_acc=1 # 运动加速度QGC参数修改
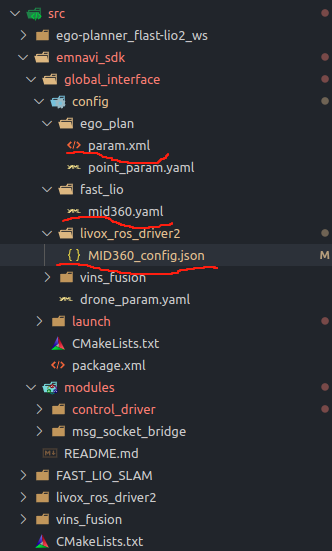
其它较为重要的参数:
主要是这三个参数文件,从上到下分别为:
- ego_planner算法的参数文件,影响避障的能力
- fast-lio的参数文件,影响里程计的精度和稳定性
- 雷达驱动的配置文件,决定能否在ROS1中使用mid360
ego-planner配置参数:
修改param/xml文件,详情请看ego-planner参数配置
fast-lio的配置参数
- fast-lio除了需要知道输入的点云和imu信息外,还需要输入雷达相对imu的坐标变换,该坐标关系,是该配置文件唯一会要修改的地方
- 具体测量方法,可以通过LIDAR_IMU_Init模块,得到雷达相对imu的坐标变换,通常用默认的即可
- 实际测量,具体使用方法请查阅港大的LIDAR_IMU_Init,本机运行LIDAR_IMU_Init模块
roslaunch LiDAR_IMU_Init livox_mid360.launch- 得到雷达相对imu的4*4的齐次矩阵
Homogeneous Transformation Matrix from LiDAR to IMU:
-0.939384 0.017007 0.342446 -0.009993
-0.023921 -0.999586 -0.015976 -0.001494
0.342033 -0.023199 0.939402 0.121600
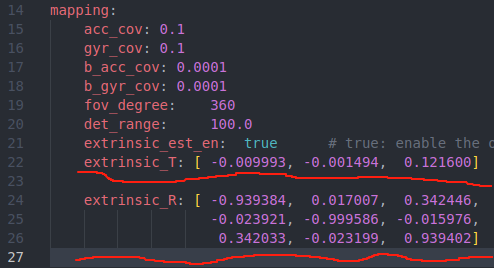
0.000000 0.000000 0.000000 1.000000- 依次填入fast-lio的3*3旋转矩阵 extrinsic_R 中;
- 将上述矩阵中1行,1~3列的元素,放到extrinsic_R的第1行中
- 将上述矩阵中2行,1~3列的元素,放到extrinsic_R的第2行中
- 将上述矩阵中2行,1~3列的元素,放到extrinsic_R的第3行中
- 将上述矩阵中第1、2、3行的第4列元素,把这三个元素放到extrinsic_T中
- 具体如下图所示
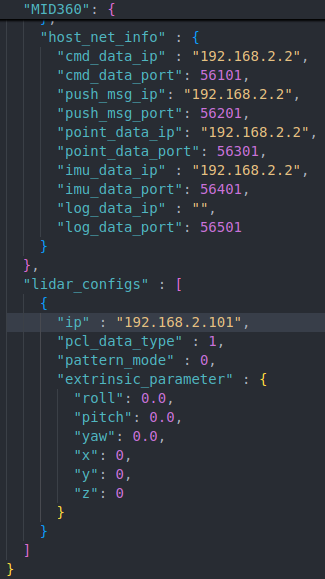
修改雷达驱动的配置文件
- MID360_config.json:
- MID360雷达的IP,默认为:
- 192.168.2.101
- 连接的飞机NX主机的网卡ip,默认为:
- 192.168.2.2
- MID360雷达的IP,默认为: