
外观
自主飞行
自主飞行注意事项
飞行时要有飞手和电脑操作手。飞手要一直盯着飞机!
电脑操作手,能够通过远程终端控制X280,运行自主飞行脚本
若飞行中,发生超出预期的飞行情况:
- 飞手请及时将急停拨杆,拨到最下方!
- 若对飞机操作非常熟悉: 可拨动模式拨杆至中间,飞手进行手动悬停降落!
飞行前,确保以下操作完成:
- 1)飞行前的安全检查(飞手能正常控制飞机、飞机电池电量正常、飞机的NX主机上电正常)
- 2)电脑能通过SSH连接到飞机的NX主机,并进入到emnavi/X280文件夹下,能通过命令栏下发命令
- 3)雷达球面,不能有物体大范围遮挡 (1/4面积)
- 4)飞机水平放于地面
运行自主飞行脚本
- 1)飞机初始化
- 运行飞机初始化脚本
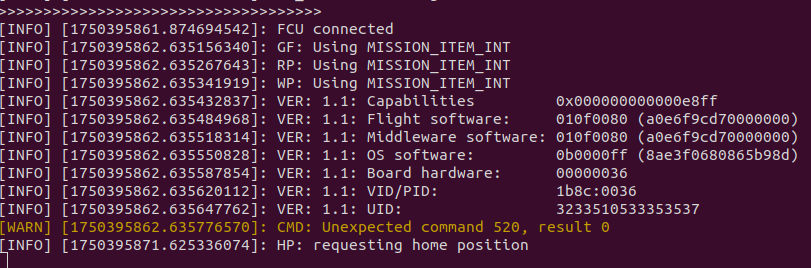
one_shot_single.sh,让PX4与飞机的NX主机连接
脚本启动后,电脑端的QGC地面站,应该能观察到飞行器连接 此时,命令栏应如下图所示:bash scripts/one_shot_single.sh - 运行飞机初始化脚本
- 2)启动激光里程计fast-lio:
- 再次确认飞机静止于地面后,运行激光里程计fast-lio脚本
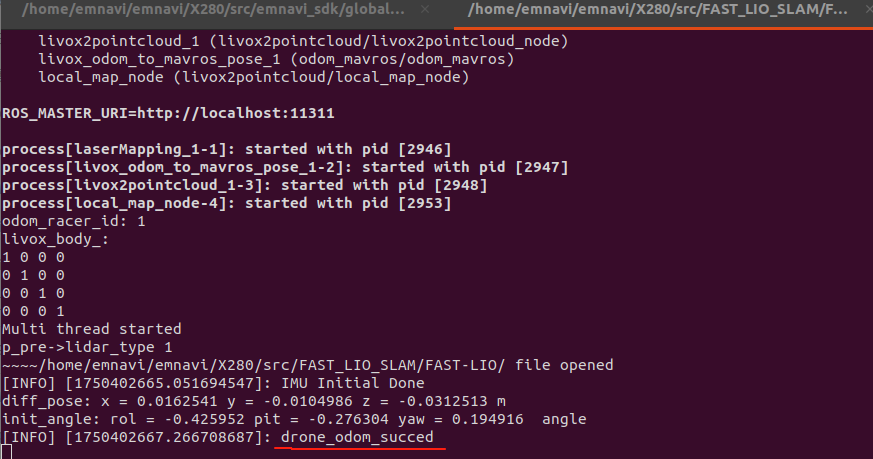
fast_lio.sh
脚本启动3秒后,启动成功后命令栏会显示drone_odom_succed,如下图:bash scripts/fast_lio.sh - 再次确认飞机静止于地面后,运行激光里程计fast-lio脚本
- 3)起飞悬停
- 运行起飞悬停脚本
take_off.sh后,等待片刻飞机将起飞 - 飞机起飞完成后,将悬停在离地高度0.5m左右
bash scripts/take_off.sh - 运行起飞悬停脚本
- 4)自主飞行避障
- 当飞机高度稳定后,让飞机运行ego-planner自主飞行避障脚本
run.sh - 通过ego-planner算法,进行自主飞行避障
bash scripts/run.sh- 飞机会按照默认设置两个的轨迹点(点0(5,0,0.6),点1(1,0,0.6)),进行自主飞行避障
- ego-planner飞行结束,后飞机会保持悬停
- 当飞机高度稳定后,让飞机运行ego-planner自主飞行避障脚本
- 5)悬停降落 当飞机稳定悬停后,运行悬停降落脚本
kill_one_shot.sh飞机桨叶转速降低,到地面后桨叶将会停止旋转,如此你就完成一次ego-planner的飞行了!bash scripts/land.sh - 6)飞机完成飞行,并成功降落后
- 电脑端运行,关闭所有节点脚本
kill_one_shot.sh
bash scripts/kill_one_shot.sh - 电脑端运行,关闭所有节点脚本