
外观
使用 QGC 进行飞行器设置
打开QGC,通过有线连接至无人机
进行陀螺仪校准
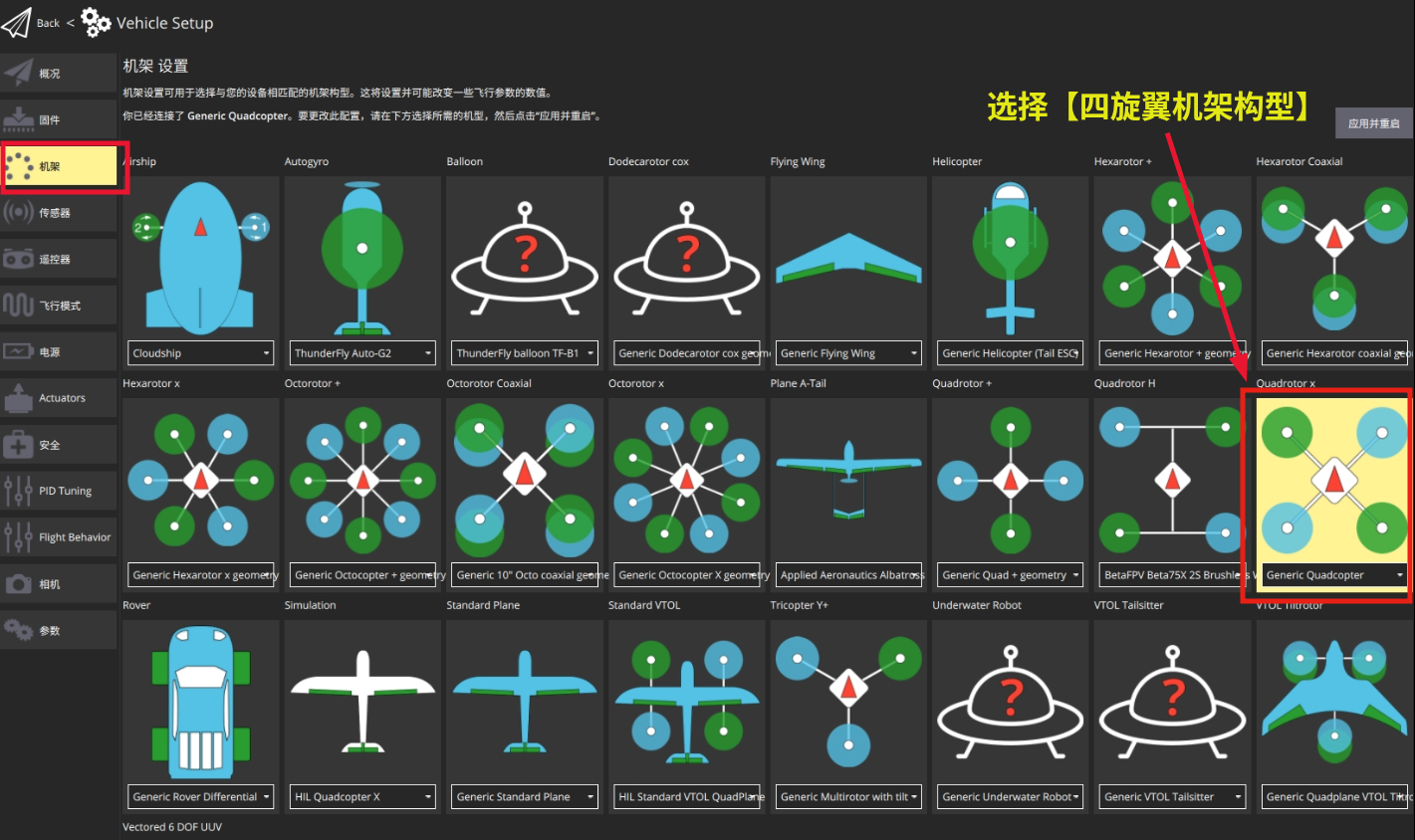
# 进入无人机电脑终端,启动 mavros 和 qgc 连接 # *启动 QGC 的电脑IP 以实际为准,这里以 10.42.0.2 为例 roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:921600 gcs_url:=udp://:14556@10.42.0.2:14550选择四旋翼机型
将无人机静置在水平面,再进行陀螺仪校准

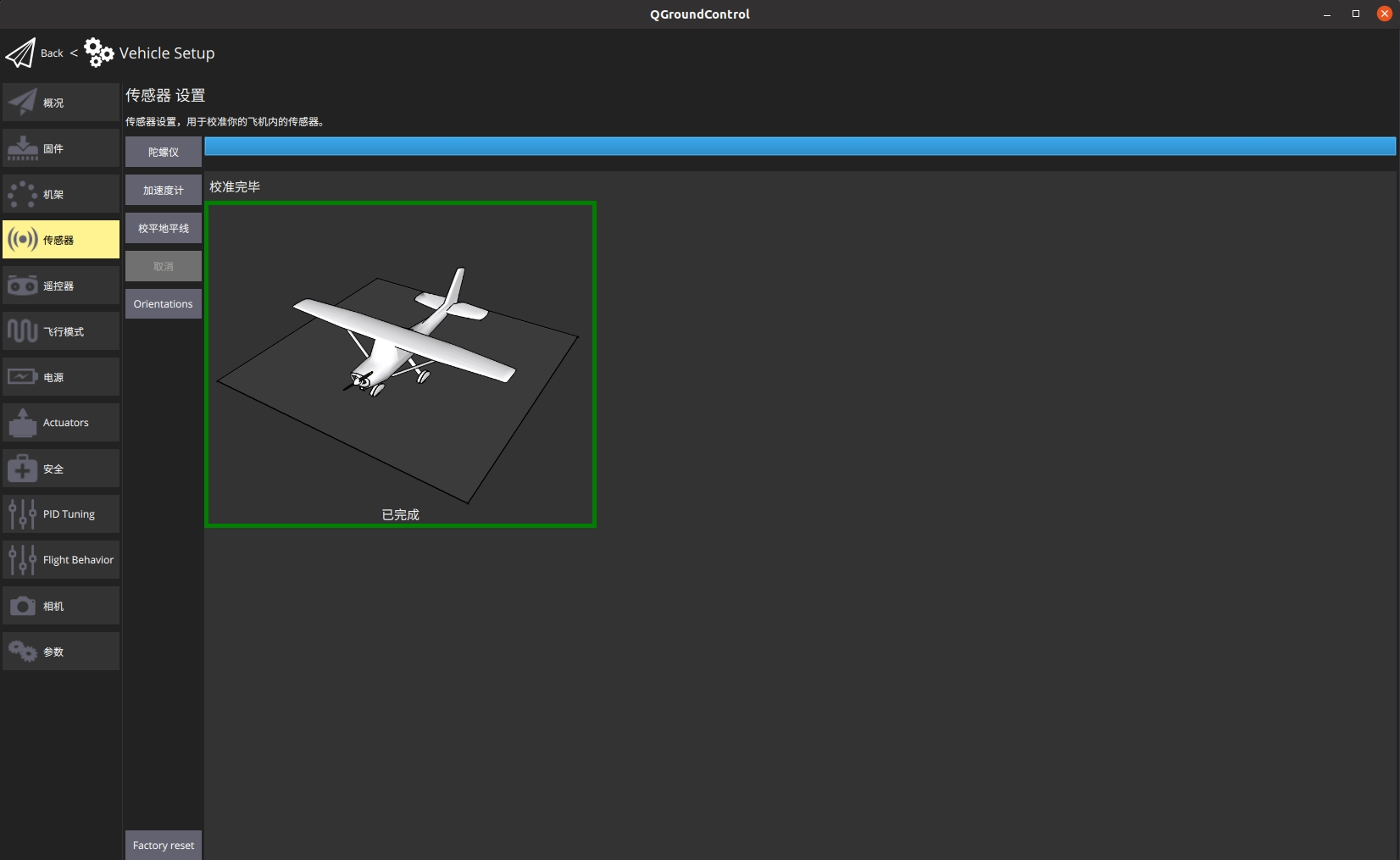
陀螺仪校准后结果如下图所示
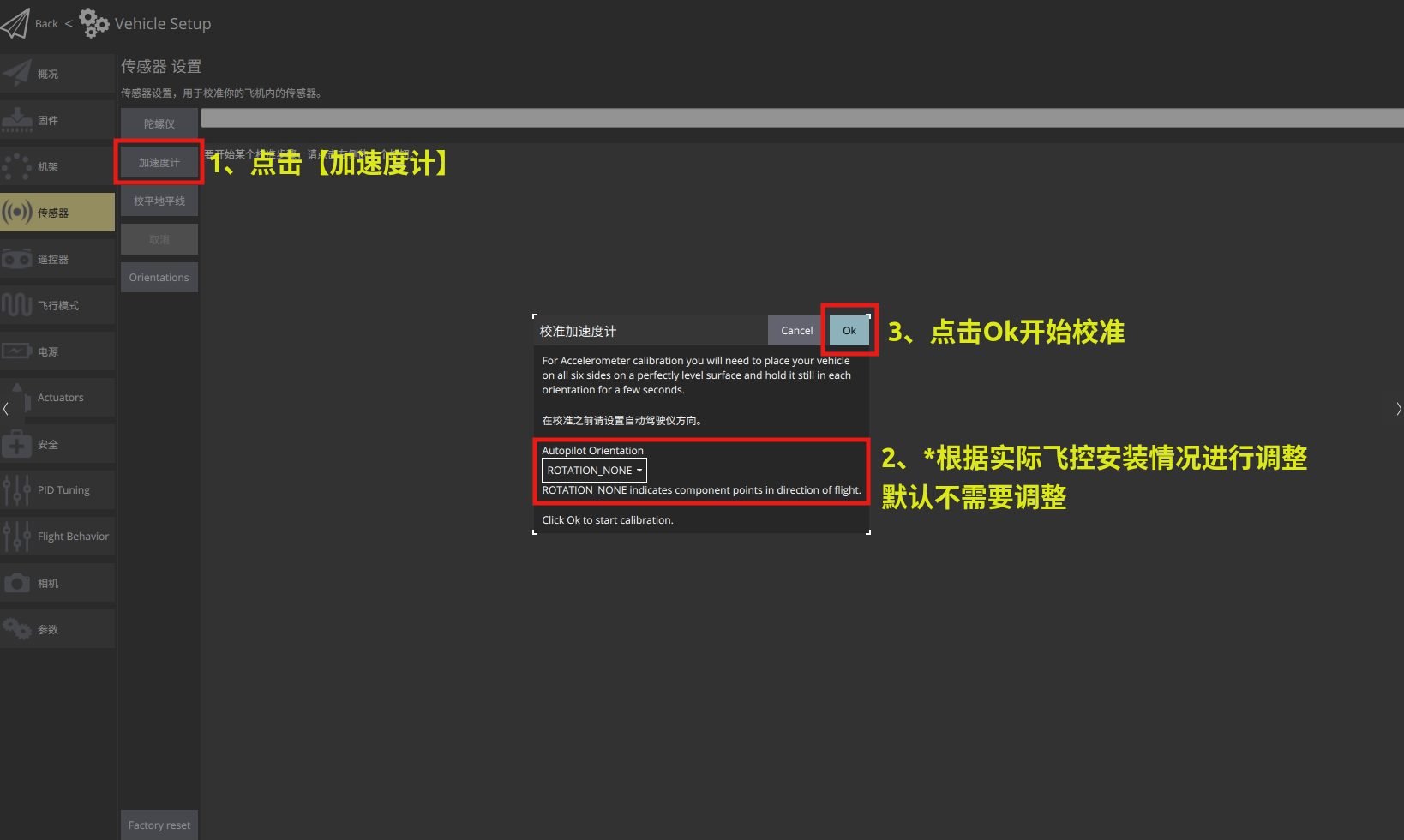
进行加速度计校准
这里需要根据飞机实际飞控安装的情况进行选择,默认选择
ROTATION_NONE, 如果是其他的安装朝向,选择对应的旋转方式即可。建议先把飞机放置在平稳的地面上,再点击开始:
 每完成一个校准动作,对应的框就会变为绿色:
每完成一个校准动作,对应的框就会变为绿色:  全部校准后如下图所示
全部校准后如下图所示 
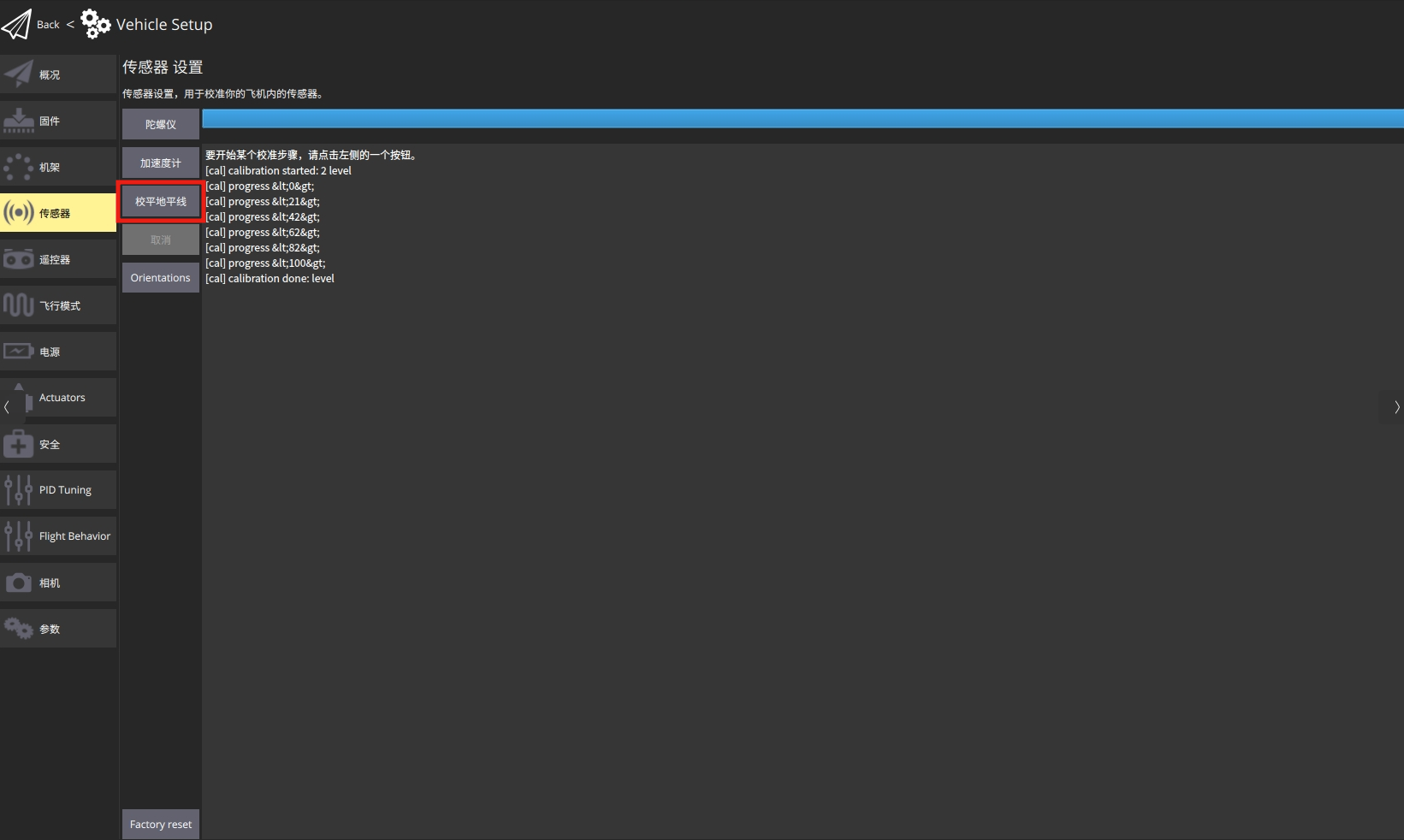
校正地平线
先把飞机放置在平稳的地面上,再点击开始:
校准遥控器
需要先将遥控器连接到飞机上,才能进行操作:
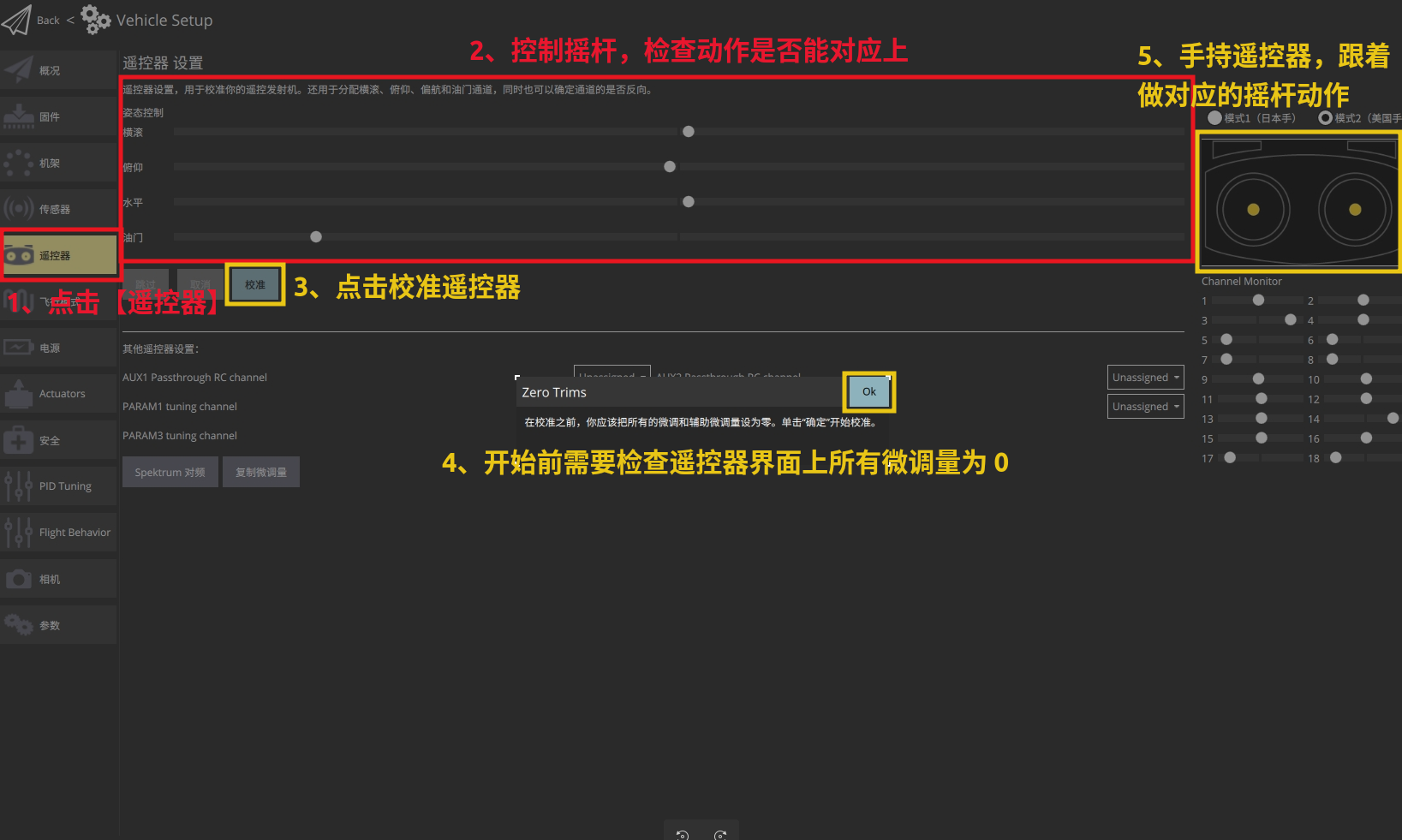 提示你对摇杆做出对应动作,包括:
提示你对摇杆做出对应动作,包括: 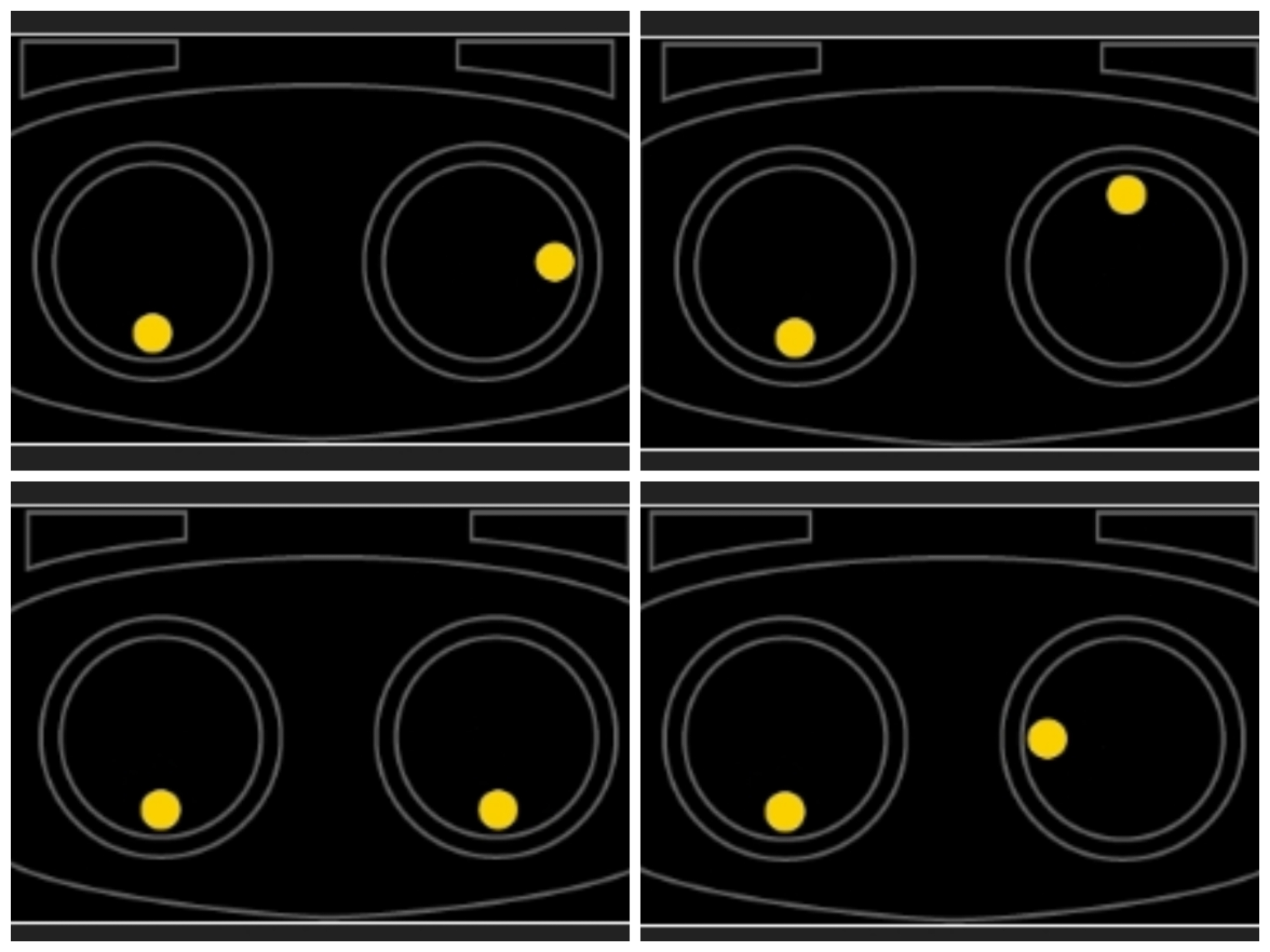 当按钮变为【下一步】时,表明已完成校准,记得点击一下【下一步】,保存校准的参数。
当按钮变为【下一步】时,表明已完成校准,记得点击一下【下一步】,保存校准的参数。 
校准电调
待更新...
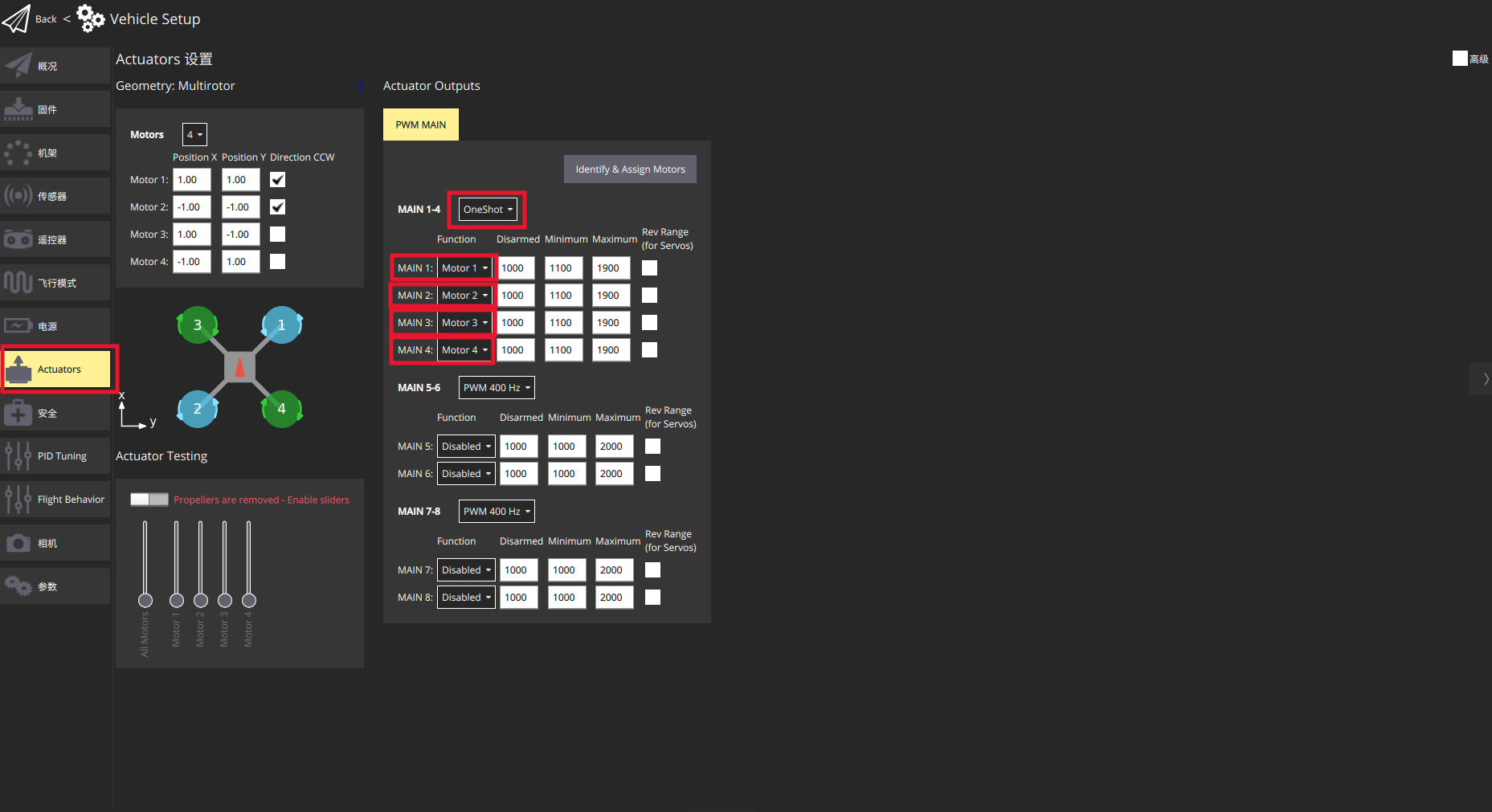
设定通道功能

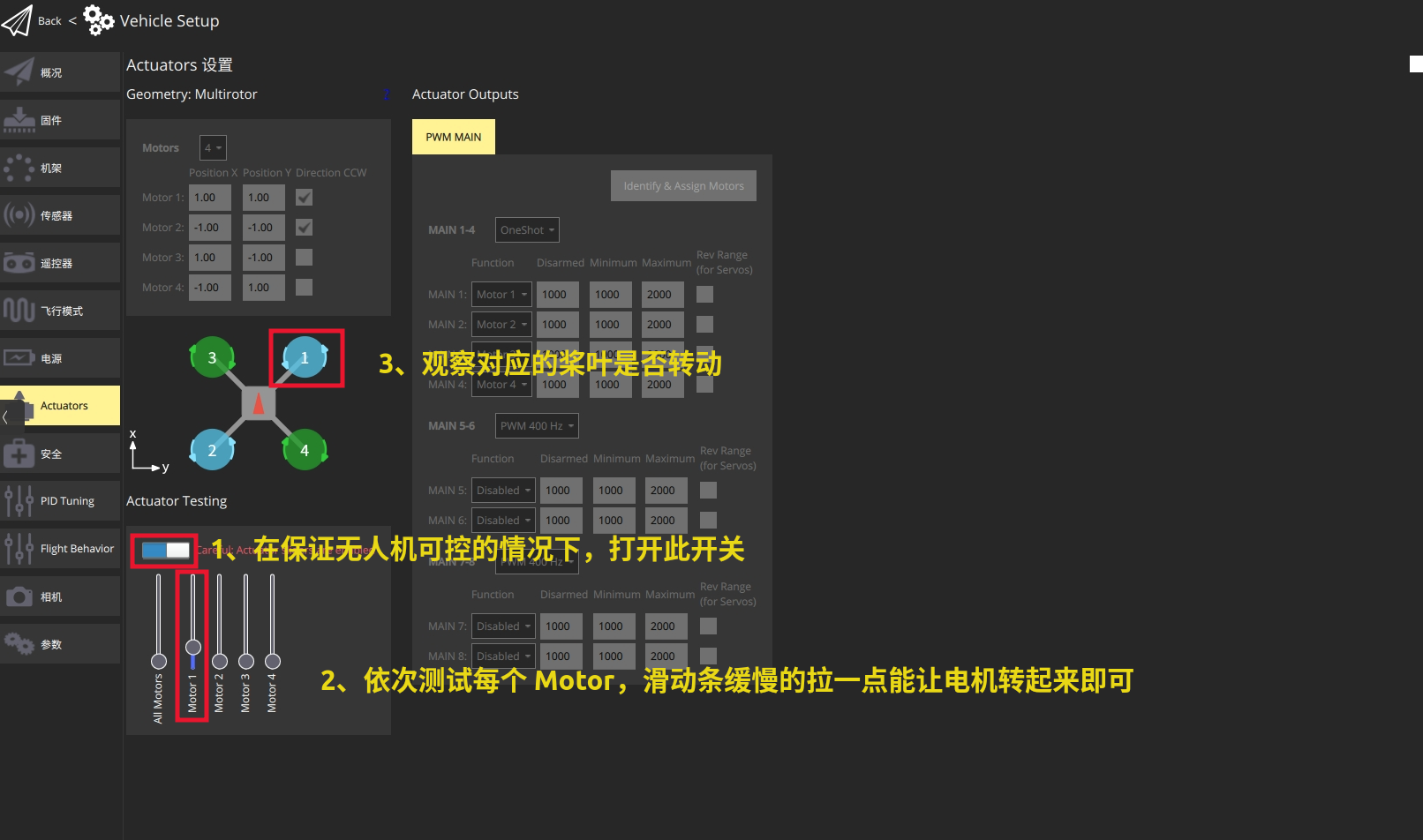
测试螺旋桨
在保证桨叶已拧紧,无异物干扰桨叶旋转的前提下进行操作
按图示设置好每个电机:
在无人机可控的情况下小心操作,避免炸机
重启飞行器,使得参数生效
检查姿态
在 QGC 主界面右上方,可以看到无人机的水平仪,你可以通过手持无人机俯仰、偏航、滚转并观察显示值来确定无人机姿态正确。
简易飞行测试
在进行飞行之前,再检查一遍飞机电池电压,然后拿起遥控器,解锁无人机,尝试推大油门并进行飞行动作。测试无人机前后左右,旋转动作都是否正确。
常见问题
Q: QGC 连接不上无人机?
可能存在 USB 接口接触不良,或者 QGC 使用了过旧的版本,多重启几次试试。